Исследователи из Вустерского политехнического института создали OmniWheg — роботизированную систему, которая может адаптировать свою конфигурацию в процессе навигации по окружающей среде, трансформируя конструкцию колес.
Этот робот, представленный в статье IEEE IROS 2022, предварительно опубликованной на arXiv, основан на обновленной версии так называемых «whegs», серии механизмов, предназначенных для трансформации колес или крыльев роботов в ноги.
«Популярность четвероногих и двуногих роботов растет, и причиной этого может быть поиск «антропоморфизации», которым обычно занимается широкая аудитория, — сказал профессор Андре Розендо, один из исследователей, разработавших робота. — Хотя «возможность ходить везде, куда бы мы ни пошли» звучит как захватывающий призыв, энергетическая стоимость ног очень высока. У нас, людей, есть ноги, потому что так дала нам эволюция, но мы не решились бы создать «автомобиль с ногами», поскольку знаем, что такая поездка не будет такой же комфортной и энергоэффективной, как поездка на автомобиле c колесами».
Основная идея недавней работы Розендо и его коллег заключается в том, что, хотя ноги делают роботов более близкими, придавая им человекоподобные качества, они не всегда являются оптимальным решением для того, чтобы роботы выполняли задачи быстро и эффективно. Вместо того чтобы разрабатывать робота с одним механизмом передвижения, команда поставила перед собой задачу создать систему, способную переключаться между различными механизмами.
Розендо и его коллеги задались целью создать колесо, которое могло бы менять свою конфигурацию, чтобы подниматься по лестнице или обходить другие небольшие препятствия. Для этого они изучили концепцию «whegs» (wheel-legs/wing-legs), которая существует уже более десяти лет и с тех пор привлекает значительное внимание робототехников. За последние несколько лет было разработано и испытано несколько систем «whegs». Однако большинство из этих систем не показали хороших результатов, в основном из-за трудностей с координацией правой и левой сторон системы, которые должны быть идеально выровнены, когда робот поднимается по лестнице.
«Чтобы решить проблемы координации, обычно связанные с механизмами «whegs», мы использовали всенаправленное колесо, — объяснил Руисян Цао, ведущий студент, создавший эту систему. — Это последняя часть головоломки, поскольку оно позволяет роботу выравниваться на лету, не вращая корпусом. Наш робот может двигаться вперед, назад и в сторону при очень низких энергетических затратах, может оставаться в стабильном положении без энергетических затрат и может быстро подниматься по лестнице, когда это необходимо».
Для правильной работы системы wheg, созданной Розендо и его коллегами, необходимо добавить по одному сервомотору на каждое колесо и простой алгоритм. В остальном конструкция системы проста и понятна, поэтому она может быть легко воспроизведена другими командами по всему миру.
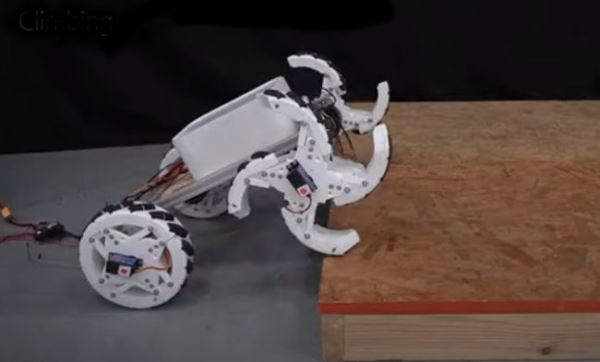
Исследователи оценили свою систему OmniWheg в серии экспериментов, сосредоточенных на множестве реальных сценариев внутри помещений, таких как обход препятствий, подъем по ступеням различной высоты и т.д. Результаты оказались весьма многообещающими, поскольку робот на колесах-ногах смог успешно преодолеть все распространенные препятствия, на которых проводились испытания, гибко и эффективно адаптируя свою конфигурацию для эффективного решения отдельных задач локомоции.
В будущем система, созданная Розендо и его коллегами, может быть интегрирована в существующие и новые роботы, чтобы повысить их эффективность при навигации в закрытых помещениях. Кроме того, работа команды может вдохновить на разработку аналогичных систем, основанных на всенаправленных колесах.
Источник: robogeek.ru