Заимствуя методы, используемые для производства оптических волокон, исследователи из EPFL и Имперского колледжа создали мягких роботов на основе волокон с усовершенствованным управлением движением, которые объединяют в себе другие функциональные возможности, такие как электрическое и оптическое зондирование и целевая доставка жидкостей.
Объединив достижения в разработке функциональных волокон с разработками в области интеллектуальной робототехники, исследователи из Лаборатории фотонных материалов и волоконных устройств Инженерной школы EPFL создали многофункциональных мягких роботов в форме катетеров, которые могут дистанционно направляться к месту назначения или, возможно, даже самостоятельно находить дорогу благодаря полуавтономному управлению. «Это первый случай, когда мы можем генерировать мягкие катетероподобные структуры такого масштаба, которые могут интегрировать сложные функциональные возможности и управляться, потенциально, внутри тела», — говорит Фабьен Сорин, главный исследователь. Работа была опубликована в журнале Advanced Science.
Исследователи создали волокна с помощью процесса термической вытяжки, который обычно используется для производства оптоволоконных кабелей. Выбор материала был критически важен, причем эластомеры, которые возвращаются к своей первоначальной форме при растяжении, были предпочтительным кандидатом. Помимо гибкости, они достаточно мягкие, чтобы минимизировать повреждения нежных тканей тела. «Но, — говорит Андреас Лебер, первый автор исследования, — исторически сложилось так, что термическая вытяжка ограничивалась твердыми материалами. К счастью, наша группа выявила класс термопластичных эластомеров, которые могут быть вытянуты и сохраняют свои свойства после вытяжки».
Для создания длинных волокон с множеством каналов по всей длине исследователям пришлось точно настроить параметры процесса вытягивания. «Важной характеристикой процесса является взаимодействие между вязкостью материала, которая позволяет вытягивать непрерывное волокно, и поверхностным натяжением, которое может привести к разрушению каналов внутри них», — говорит Фабьен Сорин.
Добившись нужных свойств материала, скорости вытягивания и температуры, команда смогла надежно создать непрерывные каналы, аккуратно расположенные в волокне на микрометровом уровне, необходимые для придания волокну роботизированных возможностей. Например, используя мотор для натягивания одного или нескольких сухожилий, введенных в каналы врачи смогут контролировать ориентацию конца волокна для проведения его через тело.
Помимо каналов, волокна могут быть оснащены различными элементами с помощью процесса термической вытяжки. «Помимо сухожилий, в волокна можно интегрировать оптические направляющие, электроды и микроканалы, которые обеспечивают доставку лекарств, визуализацию, запись и стимуляцию, а также другие инструменты, обычно используемые в робототехнике и медицинских приложениях», — объясняет Лебер.
Эти функциональные элементы также открывают путь к созданию автономных роботов в форме волокна. «Интегрированные оптические направляющие придают волокнам чувство зрения. Они могут самостоятельно обнаруживать и избегать препятствий на своей траектории и даже находить целевые объекты», — продолжает Лебер. Важнейшее значение для этой работы имеет сложный алгоритм управления и программный пользовательский интерфейс, разработанные с нуля командой лаборатории.
Хотя это может показаться сложным, эти мультиматериальные волокна удивительно просты в производстве. «Мы используем технологию изготовления оптического волокна, которая очень масштабируема. Вы можете создать сотни километров оптического волокна за одну ночь. В результате наш подход к изготовлению дает новый, масштабируемый способ создания мягких катетероподобных структур с беспрецедентным сочетанием передовых функциональных возможностей», — говорит Сорин.
Дистанционно управляемые катетеры — лишь одно из многих интересных потенциальных применений, которые может обеспечить этот новый класс мягких роботов на основе волокон. «Подход к управлению движением на основе сухожилий — это первый шаг в развитии «умных» катетеров на основе термической вытяжки. Следующий шаг будет связан с переходом к электрическим или магнитным способам приведения в действие и тестированием захватывающих возможностей таких волокон, что еще на один шаг приблизит их к клиническому применению», — говорит Бурак Темелкуран, соавтор и руководитель группы в Центре роботизированной хирургии Hamlyn при Имперском колледже.
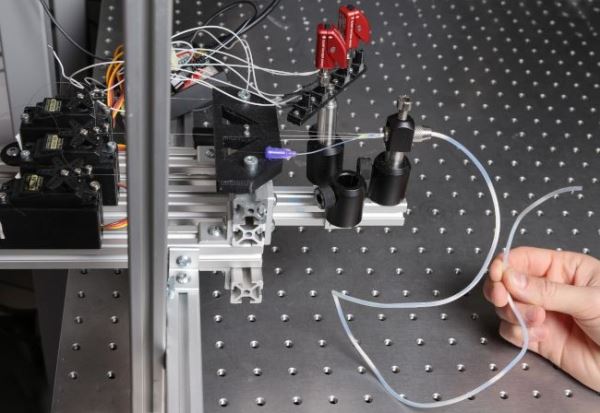
Фото: Alain Herzog
Источник: robogeek.ru