Команда ученых из EPFL разработала новую систему нейронных сетей, которая может помочь понять, как животные адаптируют свои движения к изменениям в собственном теле, и создать более мощные системы искусственного интеллекта.
Глубокое обучение получило развитие благодаря искусственным нейронным сетям, которые складывают простые вычислительные элементы друг на друга, создавая мощные обучающие системы. При наличии достаточного количества данных эти системы могут решать такие сложные задачи, как распознавание объектов, победа над человеком в го, а также управление роботами. «Как вы можете себе представить, архитектура укладки этих элементов друг на друга может влиять на то, сколько данных вам потребуется для обучения и какова будет предельная производительность», — говорит профессор Александр Матис из EPFL.
Матис совместно с докторантами Альберто Чиаппа и Алессандро Марин Варгас разработал новую сетевую архитектуру под названием DMAP (Distributed Morphological Attention Policy). Эта архитектура включает в себя фундаментальные принципы биологического сенсомоторного контроля, что делает ее интересным инструментом для изучения сенсомоторных функций.
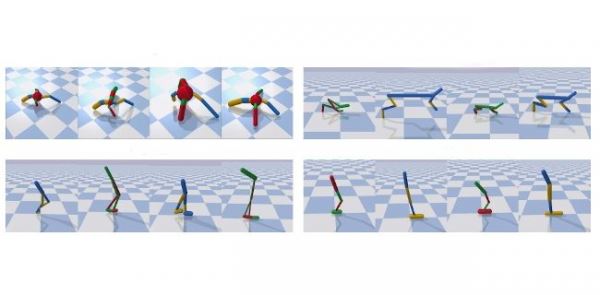
Проблема, которую пытается решить DMAP, заключается в том, что животные и люди эволюционировали, чтобы адаптироваться к изменениям как в окружающей среде, так и в собственном теле. Например, ребенок может адаптировать свою способность эффективно ходить в течение всего периода изменения формы и веса тела от младенчества до зрелого возраста. При разработке DMAP команда сосредоточилась на том, как животное может научиться ходить, когда его тело изменяется в длине и толщине.
"Обычно в обучении с подкреплением для обучения двигательным навыкам используются так называемые полностью связанные нейронные сети, — говорит Матис. — Обучение с подкреплением — это метод машинного обучения, который «вознаграждает» желаемое поведение и/или «наказывает» нежелательное.
Он продолжает: «Представьте, что у вас есть датчики, которые оценивают состояние вашего тела. Сигналы этих датчиков являются входом для двигательной системы, а выходом — активации мышц, которые генерируют крутящий момент. Если использовать полностью связанные сети, то, например, в первом слое интегрируются все датчики со всего тела. В отличие от этого, в биологии сенсорная информация объединяется иерархическим образом».
"Мы взяли принципы нейронауки и перенесли их в нейронную сеть, чтобы создать лучшую сенсомоторную систему, — говорит Альберто Чиаппа. В своей работе, опубликованной на 36-й ежегодной конференции NeurIPS, исследователи представляют DMAP, которая «сочетает в себе независимую проприоцептивную обработку, распределенную политику с индивидуальными контроллерами для каждого сустава и механизм внимания для динамической передачи сенсорной информации от разных частей тела к разным контроллерам».
DMAP смог научиться «ходить» с телом, подверженным морфологическим изменениям, не получая никакой информации о конкретных параметрах, таких как длина и ширина конечностей. Примечательно, что DMAP могла «ходить» так же хорошо, как и система, имеющая доступ к этим параметрам тела.
«Итак, мы создали систему обучения с подкреплением благодаря тому, что мы знаем из анатомии, — говорит Альберто Кьяппа. — После обучения этой модели мы заметили, что она демонстрирует динамический гейтинг, напоминающий то, что происходит в спинном мозге, но интересно, что это поведение возникло спонтанно».
В целом, модели подобные DMAP выполняют две функции: создание более совершенных систем искусственного интеллекта на основе биологических знаний и создание более совершенных моделей для понимания мозга.
, нейронные сети
Источник: robogeek.ru